
August 15th, 2025
I didn’t get much sleep last night as it was pretty noisy, but I still woke up pretty late. We are at port. I grabbed a quick lunch, which were these wonderful eggplant parmesan sandwiches. Then I got ready for the day, packed up some of my stuff, and spent some time refining my project ideas before our student meeting.
I’ve mostly scrapped the acoustic protocol idea after seeing JANUS, but I was considering if there was any tooling I could still build around it. However, it’s really unclear on when and how the commercial transducers like Teledyne and Sonardyne use JANUS (besides a vague statement that they “support it”) and if and how they expose that functionality to users; kind of difficult to build tooling for JANUS not knowing the current workflow to use it. There were some more academic/research toolings for JANUS like UNetStack, but it seems like it’s mostly for R&D and simulation. One idea I have thought about that might have more opportunity is exploring how human acoustic chatter affects sea life, and protocols that are more gentle on them.
One of my main contenders for ideas is doing something with DAS, broad, but I’ll read some papers to get more familiar with it before knowing how I want to use it. Otherwise I’m still considering a computer vision model that estimates fluid flow from hydrothermal vents (need to do a preliminary test with optical flow models to see its feasibility), or integrating shallow/deep profiler data with remote sensing (satellite) data to get a full view on the water column. We’ll see what I end up picking!
Our student meeting went great, talked about our project ideas—everyone is doing some cool things!—and helped out with moving supplies for Leg 2. Now we are planning this last day, I’d like to take a walk into Newport, and maybe see the beach.
I’d like to give a couple closing thoughts. This has been a really great experience, and especially as someone with no experience in oceanography, I was glad to see how welcoming the community is and interesting the work is. I’ve seen so many new ways of life, from the couple-expedition-a-year scientist to the crew who live most of their life at sea. I’m glad to have added this to my really diverse set of experiences these last two years of college—including working at a genomics research startup, getting involved in UW Drama’s acting classes, being part of the Seattle startup scene, and interning at big tech. As I decide where I go next, I’ll definitely be considering what I valued on this cruise: the sense of adventure, working on problems vital to humanity, and being included in a supportive community. I’ll remember the highlights: the starry nights, the feeling of being surrounded in water, late night shifts in the Jason control van, viewing live feed of depths of the ocean most have never gotten to see, the expansive sunsets—and too many more to list. I’m excited to see where my project takes me this autumn, and I wish the best for everyone I met on R/V Atlantis!
Signing off,
Anshul

August 14th, 2025
Last night, I spent some time looking more into underwater acoustic communications. I had learned earlier that JANUS was a protocol recently created by NATO, but the brief information I’d seen on it made it seem like it was pretty basic, and mostly just for identification. However I spent some time last night going through their 108 page specification for their newest version, and it looks like it’s pretty robust, and provides a good modulation and data scheme to send all sorts of data—with categories from emergency/distress to underwater mooring communications. I also found that Sonardyne and Teledyne Benthos (two major acoustic transceiver manufacturers) have developed firmware to support JANUS on their devices. This is definitely cool to see, but sadly I don’t know if there is much to do a project on now.
I woke up for lunch, which was a cookout on deck today! We had some burgers and looked out to the sea. Our student meeting today was with Adam, a computer engineer on the Jason team. This was really great for me as it was the closest person to my background I’d met. It was cool to hear how he gets to have so much freedom to work on all parts of the ROV—from electronics to PCB design to firmware. I spent some extra time getting a feel of what his job was like, and then was whisked away to the van for my shift. After, we saw some dolphins out on the main deck, I stood there with Yoochan learning about his experience with film photography.

We finished our transit and I saw land. It was actually a bit unnerving as I’d gotten used to just seeing open ocean all around. After dinner and a nap, I took my shift, and had one of the most chaotic dives the whole trip. The visibility was next to nothing, so our plans had to keep changing, and all the cables we were unplugging were overgrown with anemones—some met their end.
We transit to port in the morning. It was a good last day at se
August 13, 2025:
Last night, we went to the bow, the darkest part of the ship. It was definitely a surreal feeling to be floating in the middle of the ocean in pure darkness. The stars looked great, and because the Perseids just peaked, we saw a couple meteors too!
After coming inside, I did some research into current state of underwater acoustic communications, worked on a puzzle, and went to bed. This morning, I completed my daily routine of getting ready in a combination of my phone-lit room (to avoid waking up my roommate Yoochan) and a red-lit bathroom that felt like second nature by now.
Overnight, we’d transited to Oregon Offshore, and on today’s 12-4PM shift, we cut off a just-days-ago-installed shallow profiler’s science pod that had ground faulted and got stuck halfway in the water column. We then retrieved the science pod that had quickly floated to the surface. Next, we went down to retrieve the rest of the SPA module—but without the buoyant science pod attached anymore, it’s effective weight was much higher that usual (about 500 pounds). Thus instead of just latching onto it with Jason and using the thrusters to fly up to the surface, we needing the ship-Jason winch to pull the payload-bearing Jason all the way up. This was a slightly more complicated procedure, because the ship’s crane needed to be precisely vertically above Jason and the cable had constant tension the full ascent.

In today’s student meeting, we took a tour of the bridge, the highest point of the ship and control center. It was a super cool room with great views, sadly I forgot to take photos on my phone to share, but I got some on film! A couple interesting tidbits were that we carry flags of all English letters for signaling, as well as for each country we dock at—it’s custom to fly the country’s flag when entering their waters. Also, we use a dynamic positioning (DP) system to help us hold a precise position. This system uses a real wind vector but groups all unknown forces as “current”, then adjusts motors to account for the combined vectors. It’s important to note the “current” is not exactly the same measure you’d get from an acoustic doppler current profiler because it could contain other forces. Another interesting insight is that to dock the ship, we rely on the captain sticking his head out the window and radioing to mates stationed at the fore and aft for distance estimates—that’s skill!
I haven’t done much after dinner today. We’ve been spoiled with so many freshly baked breads and pastries. It was too cloudy for the sunset. I will probably miss the ship when I get back. Maybe I’ll be landsick too—Ari informed us yesterday that after being at sea for a while, stable land can be disorienting. We’ll see.
August 12, 2025:
I have conquered seasickness. For the last week, I haven’t needed any medication, and now I take advantage of the rocking: sometimes I’ll time my steps so that the ship’s tilt carries me in my desired direction.
Last night we were going to do a survey dive around the Southern Hydrate Ridge methane seeps. However, the krill attacked under the cover of darkness. Krill rise up to shallower waters to escape predators in the night. However, that meant they flooded our ballasts and we had to turn some of our generators off. A Jason dive wouldn’t be ideal.
While I slept, I believe we transited to Oregon offshore to escape the krill and do some other work. I woke up late enough to skip lunch (and don’t even mention breakfast… I have slept through it every single day) and went straight to the van to finish up a dive preparing another deep profiler for recovery.

During our student meeting, Dana, an electrical engineer from APL gave an awesome presentation. She talked about her long career working in all types of fields with a common thread of focusing on systems engineering—coordinating across all the different engineers to make sure all the components work together properly. For example, she loved her job working in the semiconductor fabrication industry, because she got to integrate such a large system with lasers, vacuums, high temperatures, and more. However her heart is in the ocean, so she came to UW APL to work on the cabled array. Some of her projects include the shallow profilers, COVIS (a sonar that measures fluid flow from hydrothermal vents), and FETCH (which are acoustic sensors around the caldera that ping each other to track horizontal expansion of Axial Seamount).
Nowadays, she’s spending a lot of time on her vision for the future of ocean sensing, which revolves around AUVs (autonomous underwater vehicles). Currently most of our instrumentation is spatially restricted to small radius or water columns. She envisions AUVs will sweep through large swaths of water and give us a full picture—collecting high spatial and temporal resolution data, not limited to the basics like temperature and salinity, chemistry, and detailed bathymetric maps. These would dock at cabled arrays for power and data transfer. There could even be buoys with satellite antennas above surface, and acoustic transducers underwater to communicate with AUVs to connect them to the internet without docking. They’ve already tested some of this in practice with Blue Robotics ROVs (simulating the AUVs) and Wibotic wireless power docks—Wibotic actually spun out of the Sensor Systems Lab, where I worked this past year, so that was a cool reference!
One of the most interesting tidbits I heard from this talk was the lack of a universal standard for underwater acoustic communications. Context. Acoustics are the main form of wireless communication underwater (EM waves don’t propagate well) between ships, instruments, and AUVs. Also, because they transmit so well, they are also used for getting information about the environment: mainly sonar for detecting objects and the seafloor (bathymetry) and acoustic doppler current profilers which take advantage of the doppler effect to infer speeds of currents at different depth. APL as well as commercial oceanic companies source their acoustic transceivers and associated software (giving 2-way acoustic communication capabilities) from companies like Sonardyne. These companies manufacture both large ship-based transducers as well as beacons and transducers for undersea instruments—in the RCA we use acoustic releases for some instruments which, on receipt of a specific acoustic signal, the device will unlatch the instrument from the seafloor so it can float up for recovery. However, the acoustic protocols to send information are not standardized across companies unlike ones on airwaves like 5G, WiFi, Bluetooth, etc. In fact, they position their proprietary protocols as a competitive edge—however this means only devices manufactured by the company work with each other leading to vendor lock in. I have an interest in Wireless Communications, so I will be looking more into the current work and possibilities for a more universal protocol!
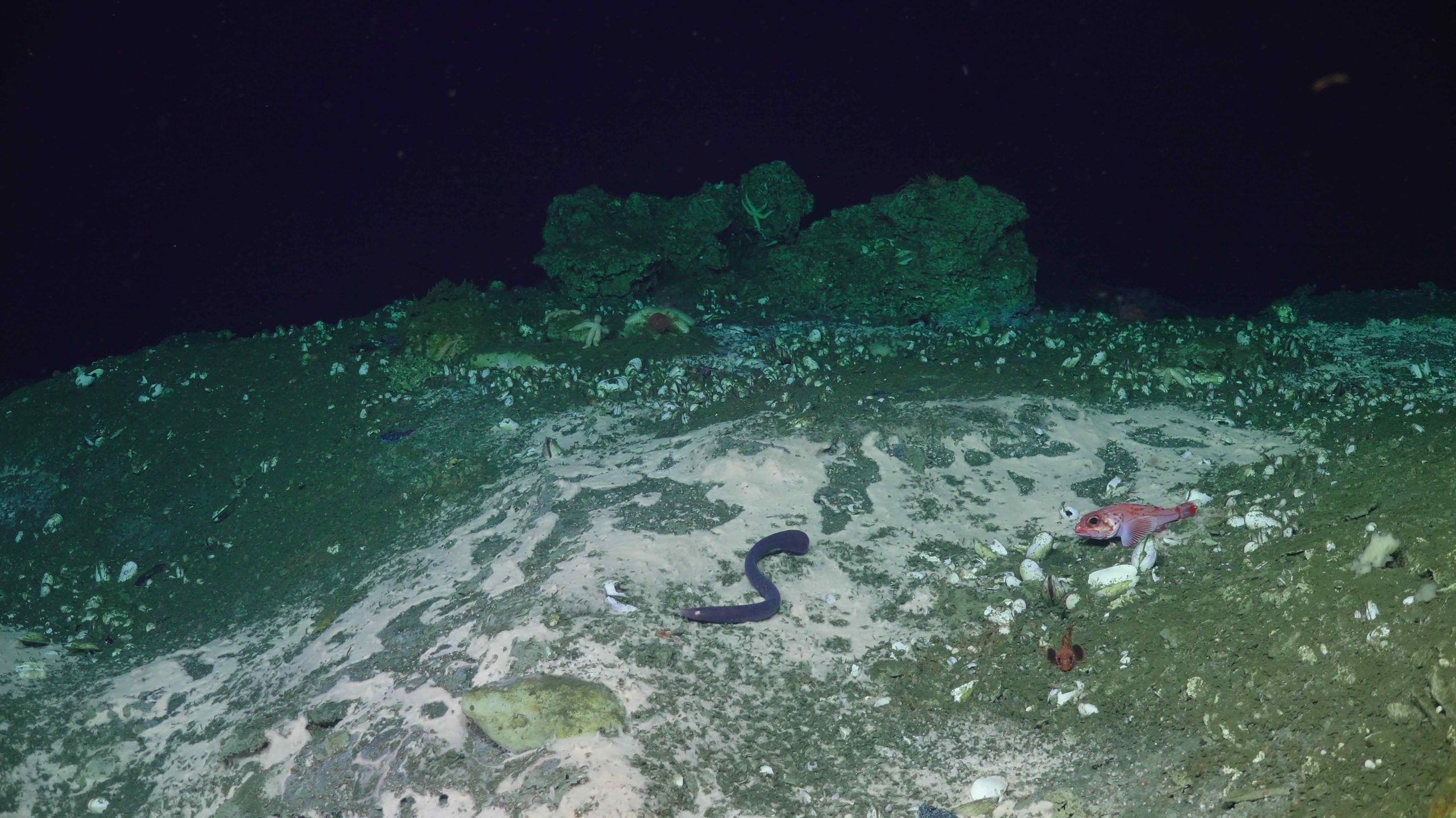
Anyways, later today we dove to the methane seeps back at Southern Hydrate Ridge, which was just teeming with life. We saw rockfishes, hagfish, sea stars, and even a deep sea skate (a type of ray). The main highlight though was the Jason crew let us try piloting the ROV! It was super fun and the joysticks were surprisingly intuitive, but definitely would be stressful if we were doing the more intense activities pilots are usually doing (like managing nav, cable length, manipulating the arms, and so much more)—Jason pilots are super good at what they do!
August 11, 2025:
I woke up today a little late and rushed over to the Jason van where we were finishing the unplugging of a deep profiler on the seafloor and taking a long ascent back up to the surface. The unplugged profilers will be picked up on leg 2. A little background on deep profilers: they are similar to shallow profilers, but they have a single cable anchored to the seafloor, kept vertical by a buoy 200m below the surface. A small sensor-laden device crawls up and down the cable to get data about the water column.
I left the van for the students meeting, which today had our captain, Derek, as a guest speaker. He told us about his path, and how rising through the ranks work. You either work in the engine room, or as part of the bridge activities. In both realms of work, there are unlicensed folks, oilers (engine room) and seaman (bridge). Either through education at a maritime academy or through experience, you can make it to the first licensed positions: 3rd engineer / mate. With hours and intensive tests, eventually you climb to the top ranks of 1st (or chief) engineer/mate. From 1st mate, it’s another set of requirements and tests to go to master/captain.
I found it interesting that as a captain, his duties are not as much about driving the ship as it is doing administrative work to make sure everything is running smoothly. And I mean EVERYTHING. Besides managing the department heads in the bridge, engineering, and steward (the cooking), he has to coordinate month-scale plans of where the ship will be, refueling, paperwork for ports/international crossings, and even help schedule flights (to and from home/port), doctor’s appointments, and coordinate prescription medications for the crew. He, like many on the ship works 3 months on, 3 months off, which he said is harder on him now that he has a family—but super attractive for younger guys who get to earn a year’s salary in 6 months (not spending much during this time) and then travel while on shore.
I learned that the most important position on a ship is the person keeping watch. It’s essential to making sure everything is safe and we’re not about to crash into another ship. I also learned that there is a superstition about bananas being on boats—but thankfully for us it doesn’t apply to ships. One of his most interesting stories was when they noticed Cuban refugees on a homemade raft. They communicated with the Spanish speakers on the crew that they had been out for 16 days, and now without food or water. They also said they’d rather stay on the raft than to go back to Cuba. After tossing them a hose to drink fresh water, Derek decided to bring them onboard, fed them well, and arranged with the Coast Guard how to proceed. A dozen miles off the coast of Florida, the refugees, happily wearing R/V Atlantis merch, exited the ship onto a coast guard vessel. We don’t know what happened to them after, but hopefully they found safety.

Derek then showed us Alvin’s hangar. Alvin is the iconic submersible that this ship has been built around hosting. While we haven’t used it, it has similar robotic arms and capabilities as Jason—but comes with a lot more complexity since it holds humans, and I’m not sure if it can carry payloads. However, it’s a storied part of oceanographic history, (and still used pretty heavily on other research cruises!) so it was pretty cool to see.
After, we had dinner, watched the sunset, and now we’re transiting to Southern Hydrate Ridge, where we’ll do a science focused Jason dive mapping the vents there!
August 10, 2025:

Last night, I didn’t have any responsibilities as we started our 20 hour transit back towards Slope Base. I stayed up however, caught up on blogs, and went on a little rabbit hole about how, to study currents, oceanographers used to release messages in bottles and tell beachcombers to alert them if they washed up. This 20 hour transit has been much calmer than the last one (where the bow would hit some really big swells, and I’d feel some mild G-forces) so I had a nice sleep.
During lunch, I had a really great conversation with Natalia, a network engineer that works for OOI-RCA. She is responsible for handling the servers that interface directly with the cabled array. While this cruise (her first one) isn’t directly related to her job, she chose to come for the unique experience and because the RCA team always need helping hands. It was great hearing about her path from a math major, to a network engineer at big tech in Seattle, and leaving that stressful job for this, in her words, more relaxed one.
Afterwards, we took a tour of the engine room. It was hot and noisy, but I was just focused on the sheer complexity of it. It’s insane how many things have to work together for this ship to function, it’s truly an engineering marvel. Afterwards, I spent some time hanging out on the sunny deck with Nadia. It was really cool hearing about her work with Seagliders, both on the manufacturing/assembly end at APL, as well as maintaining and fixing existing Seagliders through the School of Oceanography’s Student Seaglider Center (SSC). Brief context, Seagliders are autonomous underwater vehicles (AUVs) that collect data traveling through oceans, that were invented by and currently produced by UW APL; theSchool of Oceanography’s SSC focuses on maintaining a fleet and deploying Seagliders for specific scientific missions.
Although we finished transit earlier this morning, we haven’t launched Jason and aren’t planning to for the foreseeable future: the wind and swells are just too dangerous for deployment. Thankfully for us, at least the conditions feel okay on board, the boat isn’t rocking too much. Since none of us had work for our shifts, we played cards. I played cribbage for the first time which was interesting, especially since it is known as a maritime game.

After watching one of the first clear sunsets I’ve seen on the boat (no green flash sadly), I looked out at the night sky. The moon looked incredible low on the horizon over the inky waters, but I think the combination of moonlight and the ships lights meant the stars—while visible—weren’t as spectacular as I might have expected.
While eating some late night bread (baked by our wonderful Ashley) and butter, Ronnie, one of the Jason members joined the table. I learned about his 15 year career as part of the crew on the Atlantis and then his transition to more mechanical engineering work on Jason. It was cool hearing his lifestyle: most of his time on land at home making music with his band, while at sea for around 120 days a year working on Jason. This would probably be one of the most doable (at least to me) schedules of people I’ve met—I don’t know if I could spend a majority of my year at sea!
In other news, I snapped a lot of photos on my film camera today, and looking forward to getting my rolls developed when we get back.

August 9, 2025:
Today I woke up feeling much more well rested than the last couple mornings. After grabbing lunch, I didn’t really need to go anywhere for my shift! Jason had an electrical problem early this morning, and they were still working on fixing/testing it. During our student meeting, Andy, an electrical engineer on UW APL gave a talk. He works mostly with the shallow profilers.
It was really interesting hearing about the intricacies of that work. Each year they replace the full PIA (static sensor array) and SPA (science pod that moves up and down through the water column) units, and take the old ones back to shore. They then clean them, replace parts, update any firmware, and get them ready for the next cruise. Andy is a newer engineer on the team that’s been around for 10-15 years, so he’s coming at the stage where most of the design work is complete; his day-to-day job focuses a lot on the refurbishment/replacement/testing of the modules on land, as well as monitoring and doing any interventions of currently deployed units. For example, sometimes they’ll need to manually control the winch of the science pod (like during a planned shut off of the system).
It was also interesting hearing how they attempt to keep each instrument electrically isolated so that if one gets shorted by seawater, all don’t go dark. I believe he mentioned they use DC-DC convertors for each sensor, which provide each sensor an electrically isolated power source (at the exact voltage the sensor requires) and ground. I was interested in learning more about this, so I did some research afterwards. DC-DC convertors actually convert DC to AC, using a transformer to step the voltage, and rectify back to DC. The transformer, because it’s just two inductors linked magnetically, is the source of the isolation. Another interesting tidbit was that the electrical/mechanical cable that is used by the winch and instrumented science pod is replaced each year, and during the first couple of deployments, it will actually stretch the cable a significant amount. Thus, before letting it run profiles autonomously, the APL team will do a couple of manual profiles to stretch it out, then zero the winch’s sensors when wound up to properly account for the new length of the cable.
The team got Jason up and running and so in the last hour of my shift I went to the van and logged as we tagged a deep profiler with a transponder and began descending to the seafloor to disconnect it from the extension cable on the array (during Leg 2, the R/V Sally Ride will retrieve it). Afterwards I ate some microwaved popcorn, called my parents, and ate dinner. Took a nap after, and now I’m writing this blog and getting ready for my 12-4AM shift.
August 8th, 2025

Today I woke up feeling much more well rested than the last couple mornings. After grabbing lunch, I didn’t really need to go anywhere for my shift! Jason had an electrical problem early this morning, and they were still working on fixing/testing it. During our student meeting, Andy, an electrical engineer on UW APL gave a talk. He works mostly with the shallow profilers.
It was really interesting hearing about the intricacies of that work. Each year they replace the full PIA (static sensor array) and SPA (science pod that moves up and down the water column) units, and take the old one back to shore. They then clean it, replace parts, update any firmware, and get it ready for the next cruise. Andy is a newer engineer on the team that’s been around for 10-15 years, so he’s coming at the stage where most of the design work is complete; his day-to-day job is a lot on the refurbishment/replacement/testing of the modules on land, as well as monitoring and doing any interventions of currently deployed units. For example, sometimes they’ll need to manually control the winch of the science pod (like during a planned shut off of the system).
It was also interesting hearing how they attempt to keep each instrument electrically isolated so that in case if one gets shorted by seawater, all don’t go dark. I believe he mentioned they use DC-DC convertors for each sensor, which provide each sensor an electrically isolated power source (at the exact voltage the sensor requires) and ground. I was interested in learning more about this so I did some research afterwards. DC-DC convertors actually convert DC to AC, use a transformer to step the voltage, and rectify back to DC. The transformer, because it’s just two inductors linked magnetically, is the source of the isolation here. Another interesting tidbit was that the electrical/mechanical cable that is used by the winch and science pod is replaced each year, and during the first couple of deployments, it will actually stretch that cable a significant amount. Thus before letting it run profiles autonomously, the APL team will do a couple of manual profiles to let it stretch out, then zero the winch’s sensors when wound up to properly account for the new length of the cable.
The team got Jason up and running and so in the last hour of my shift I went to the van and logged as we tagged a deep profiler with a transponder and began descending to the seafloor to disconnect it from the array (during Leg 2, we will retrieve it). Afterwards I ate some microwaved popcorn, called my parents, and ate dinner. Took a nap after, and now I’m writing this blog and getting ready for my 12-4AM shift.

August 7, 2025
Today I woke up pretty groggy over calm seas. After getting ready, we had a great lunch with wraps, fries, and broccolini. Speaking of the food, it’s been really great! Yesterday’s baked potatoes was probably the most ideal meal possible during the choppy transit. The starchy, mostly plain food was very grounding for my slight seasickness. I quickly went to the van (what we call the Jason control center) for my 12PM-4PM shift, where we were doing a flyby of a secondary junction box Jason had just installed on the seafloor, picked up the old one, and began ascending over 2000 meters. A secondary junction box is basically an ~ 8 ft long, small substation, that hosts electrical transformers that step down the voltage coming from the network to the lower voltages required by the RCA instruments, and also provides 2-way communication with data streaming to shore.
Most of my shift was just the ascent, so there wasn’t much to work on. One interesting tidbit I heard from the Jason operators was that the electromechanical cable that the winch uses to connect to Jason has been manufactured in a way where the internal braided components (a mix of electrical, fiber optic/data, cable), when under tension, will exert some torque. Jason then needs to compensate for this by spinning around a couple times—making net torque zero.
I left the shift early for our student meeting, which today had Ben, one of our ship’s lovely cooks, as a speaker. He told us about his journey through grocery stores and restaurants of all cuisines and eventually to working at sea, his current 3 month on, 3 month off position, and his love for traveling during his time off. Some interesting parts to note: the team currently works 12 hour days, all three working together for every meal; he, like many sailors doesn’t have a place on land—instead has his address at his friend’s house for mail/taxes, and spends his time on land traveling, staying with friends, and camping; fresh vegetables get used after ~2 weeks, after that lots of frozen and canned foods—meat is always frozen. It was also nice to hear that he enjoys cooking for a ship crew much more than at a restaurant because he gets to know his “customers” by name and cater to their preferences; he likened it to cooking for friends.
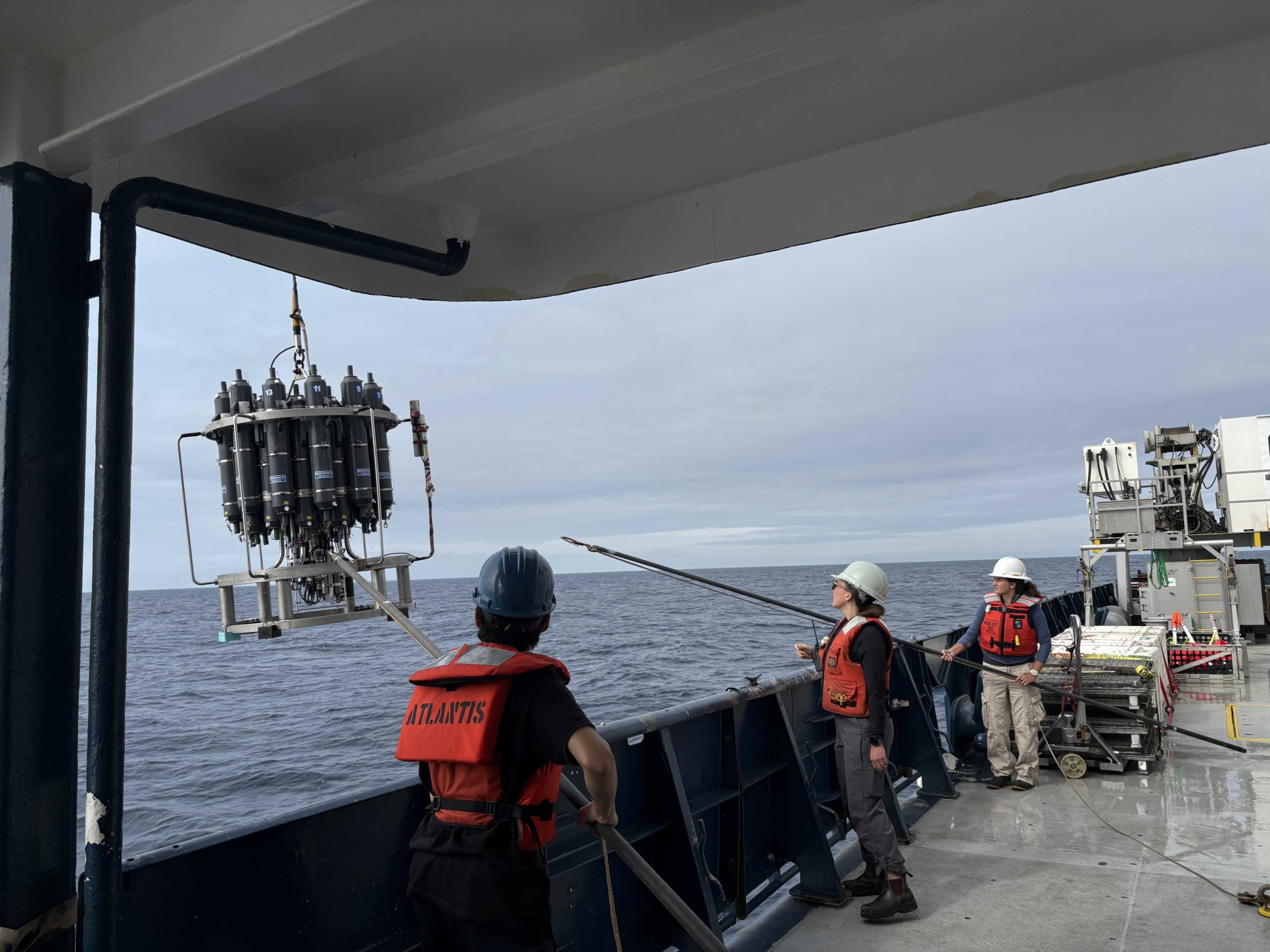
Later, we prepped a CTD rosette and deployed it, got dinner, and recovered the CTD. During dinner, I had a nice conversation with Ella, one of our SSSGs (liaison between science team and crew), who had a lot of similar experiences to Ben: 7 months at sea per year, no permanent place at land, mostly traveling and staying with friends when on shore. I’ve never really considered the lifestyle of sailors so this has been very eye opening! I had a nice FaceTime with my sister (saw the top of a whale while on deck!), and now I’m planning on taking a nap before my 12 AM shift. Apparently we will have a 1 hour transit to the ASHES hydrothermal field at the summit of Axial Seamount and will see some hydrothermal vents on the dives there tomorrow, so that should be exciting!

August 6, 2025
My early morning (12-4) dive was pretty tiring. It was a deep dive ascending from an installation of the HPIES instrument on the seafloor at Slope Base (2900 m water depth), so most of the 4 hours was watching the winch pull cable up. When I went to bed afterwards, we started our 20 hour transit to Axial Base. The seas were choppy. It was definitely a new experience regularly feeling almost weightless (especially strange when laying in bed!), and walking around on an ever-shifting floor. When I woke up I didn’t feel super great, and it was a struggle getting lunch down, but since we didn’t have much responsibilities during transit I took a 2 hour nap after lunch. It felt so good that when I woke up and saw the clock at 3, I got scared that I had slept 14 hours until 3 AM. After coming up to the Main Lab and confirming that it was not, in fact, the next day, Isabelle and I went to help Mariela with oxygen titrations on CTD fluid samples recovered a few days back.
I worked on cleaning glassware after each titration, which was a nice throwback to AP Chem — I haven’t done anything chemistry related since then. After dinner, I took yet another nap till around 9 PM. By now I was feeling pretty good, the boat was rocking less, and we reached Axial Base. I went to the Main Lab and had a great conversation with Katie.
I asked about her responsibilities as a Chief Scientist, which is a lot of writing, planning, and logistics. She also showed me the latest NSF proposal she’s writing to get a cabled benthic (seafloor) crawler to document methane seeps at the RCA Southern Hydrate Ridge site. There are currently several sensors there, but this rover transiting across the seafloor would provide an amazing ‘picture” of the biology and geology since it can move around in a sizable radius—plus with its onboard sonar it can image, for example methane plumes, even further than its transit range.
I also got some additional insight into her machine learning projects. She’s labeled marine life in about 17,000 seafloor images in just about 6 weeks, with help of a human in the loop, continuous training model. With a modified base YOLO model initially provided by MBARI, which is pretty good at labeling Pacific life, she then had it label a couple hundred of RCA images. Then she corrected the errors, fine-tuned the model on these data, and kept doing this on more and more data until the model was so accurate that the rate of correction became pretty small. Now she’s able to do a highly quantitative ecological survey analyzing what causes changes in sightings of various species, and by how much the community has changed. While this isn’t a new technique, it’s one of the first times this is being applied to oceanography imagery, highlighting many of these more recent advances in computer science which haven’t propagated to this field before this.
Realizing that there could be lots of opportunity to apply my computer science training to these problems, I asked Katie about where there are gaps in our data analysis. I learned that most of our OOI-RCA and cruise data are mostly untouched—there’s just so much to analyze. The RCA seismology and hydrophone data are one of our most well studied sources, but there’s still work to do. In addition, the much of the shallow profiler data, imagery, and Jason dive data, and ship data, are phenomenally rich data waiting to be more fully explored. I definitely am going to explore all the data sources and figure out a project from there!
We ended the night with a 12-4 shift, replacing yet another PIA and SPA on a Shallow Profiler Mooring at Axial Base. I tried working the cameras for the first time, and it was fun moving feeds around and deciding what shots were worth taking. After the shift we went to the bow to stargaze, but were met with pure darkness—too cloudy tonight.
August 5, 2025
My phone died overnight. Alarm did not go off. I woke up at 11:41 AM, missing breakfast and lunch, with a shift at 12PM – 4PM.
I took one of my shortest ever showers and brushed my teeth while throwing on clothes. Now would actually be a great time to mention the bathrooms (heads). They’re pretty cool! We have a Jack and Jill bathroom with the room next door, so you need to lock each side. The doors are magnetic against the wall so you don’t have to hold them open (although I haven’t found a good use for this). The toilets are vacuum flush, but definitely an upgrade from airline ones (we still get water). And the main attraction, the red lights! It preserves night vision, but its main affect on me is feeling like I’m in a sci-fi movie.
I rushed to the ROV van, and noticed we were working on a shallow profiler once again. Overnight we had transited from Oregon Offshore to Slope Base. Slope Base is just past the the continental slope of the North American plate. Here, there is another Shallow Profiler Mooring, and when I came in they were wrapping up dive one (removing the PIA) and I was there for most of dive 2 (replacing the PIA, recovering the Science Pod). It was a pretty standard procedure, except a fish got itself stuck in the platform! We had to work around it, moving some steps around, and while I had to leave for the student meeting, I heard it eventually got unstuck.
During cheese ‘o clock, I had a nice conversation with Dana, a from the UW Applied Physics Laboratory. It was really interesting hearing more about plans for distributed acoustic sensing (using the RCA fiber optic cable as a sensor itself) on OOI, her ideas about an acoustic protocol for transmission of data between AUVs (autonomous underwater vehicles) and the OOI, and her career as an engineer.
Later, the CTD, which had gone down to just above the seafloor (~2900 m), had returned. We filled some containers with the water collected from that depth, and gave it to the APL team (they required it as part of their procedure replacing the HPIES instrument on the seafloor). I spent some time sea-gazing, had a wonderful dinner with maple syrup glazed tofu (had to ask for the recipe), and FaceTimed family (surprising how well the WiFi works out here!). I’ll be on duty at 12AM, so getting ready for that!
August 4th, 2025
I woke up today to my roommate Yoochan telling me to get to the main lab ASAP for the fire drill. Might have overslept. I quickly went up, and we donned life jackets and immersion suits, practicing our abandon ship tactics. I grabbed some coffee from the mess and as I stepped out, realized we just left the dock. We went to the fore (front) of the ship and watched as we left Newport. Once inside, I realized seasickness actually exists. Luckily, with time, dramamine, and food (especially Cheese ‘o Clock), I felt better.
Next we learned about the CTD Rosette. I was impressed by how simple but brilliant the mechanisms are. Just spring loaded latches on tanks triggered remotely. Having openings on both ends of each tank rather than just one let water flow through unobstructed, ensuring water inside a tank at any given time truly is representative of the seawater at that depth. We learned how to arm the tanks’ latches and manage the guide ropes at deployment and retrieval, plus understood how to operate the control center in the computer lab and communicate with the winch operator on bridge.

After eating some food, I came back to see the samples had been retrieved. We were measuring their temperature and doing a chemical reaction (Winkler method) with MnCl2 and NaOH that forms a precipitate that interacts with dissolved oxygen that then can be titrated with to find out how much there was.
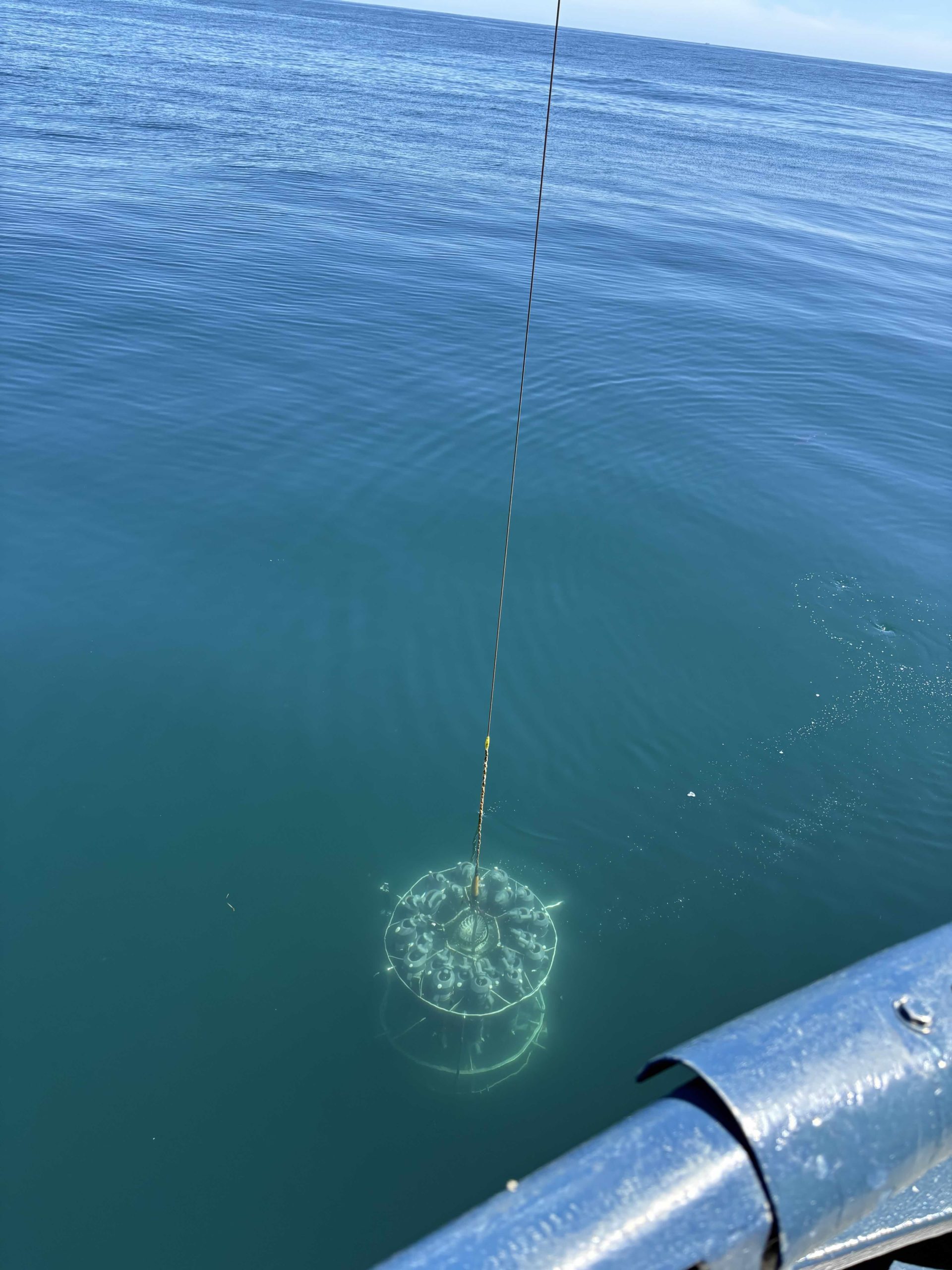
After a nap I watched the first deployment of Jason. Today’s dives were to replace the two main units of the shallow bottom profiler. Shallow bottom profilers consist of a base station about 200m under the surface, anchored by two cables (that also provide power) to the ocean floor. Attached to the base station is the PIA, which is a static module of sensors. Next to it is the science pod which traverses up to the surface and back 8 times a day collecting data. This first deployment, they worked on removing the existing PIA. As I left, I admired the sunset, wrote this blog, and now I’m going to take a nap before my 12AM-4AM shift!
Turns out I couldn’t fall asleep, so I drank coffee instead before going to the van for my first shift. As I walked in, Jason was ascending from 2nd dive of the day, where they installed a new PIA and were dragging up the old science pod. I worked the SeaLogger which was pretty fun and forced me to understand the operations so I could accurately log it. The third and final dive at this site (Oregon Offshore site) was to install a new science pod. It was awesome seeing the schools of fish, jellyfish, and so many unidentified organisms on the way down and how overgrown the profiler was with plants, anemones, and other life. After a long dive, I looked at the moon out over pure darkness, and went to bed.
August 3rd, 2025


Walking down Brooklyn Ave to Saint Bread, I frantically searched for parking lot S6 by keeping an eye out for an unmarked white van; when I saw a Dodge Caravan u-car, I realized it was a more sensible option.
My van had a great group. Katie, the Chief Scientist, on the drivers seat, Lacie, a PhD oceanography-astrobiology student in shotgun, Ari, a rising senior oceanography major next to my left, and Isabelle, a rising sophomore in the back. I learned a lot: Katie’s unique life as a working oceanographer, from UW to New Zealand and back, with over a year at sea; Lacie’s interesting work on polar algae and metabolites to understand life in extreme conditions. When asking questions about the mission and the technology, a big takeaway was that the OOI sensor network is super well established now, and while earlier missions in the early 2010s were long and focused on constructing the infrastructure, missions today are mostly about maintenance. The majority of the data scientists use for research comes from the autonomous sensors—which is in contrast to many oceanographic expeditions that focus on collecting and analyzing as many samples as possible while onboard. However, the team still collects some data during the expedition, including:
Ship data, including bathymetry and hydrophones
CTD (current, temperature, depth) rosette profiler data. This is actually more of a manual verification that the instrumented profilers that move up and down the water column and collect data are accurate — Data from CTD casts are well-established and a common technology used on ships.
Dive data, including Jason’s sensors, imagery, and logs.
Special data collected for a principal investigator (PI). On this leg, Lacie is conducting special metabolite analysis on water samples collected by the CTD we wouldn’t otherwise do. She won’t actually measure metabolite concentrations on board as that is intensive, but prepping the samples is still pretty involved.
I may be missing a data source, but still, I was pretty surprised how comprehensive the sensor network is that our main purpose of the expedition is engineering maintenance! Some other takeaways from the car ride were the importance of applying to the NSF GRFP as it unlocks so many doors for graduate studies, Katie’s cool work with computer vision, the potential to use machine learning to classify Lacie’s metabolite profiles as various biological processes, and the recent work on using the wiring of the OOI network as a sensor itself.

We arrived at Newport, and laid eyes on the beautiful R/V Atlantis. After hauling equipment and setting up our cabins, a group of us walked to town to get dinner. Newport was haunted by a fishy smell, but the cute boardwalk, ports, and saltwater taffy more than made up for it. I took some film photos of Atlantis in the sunset, took a shower, and went to bed.