Installation, operations and maintenance of RCA marine infrastructure requires specifically designed remotely operated vehicles (ROV) and operational conditions very different from standard science cruises: 24-hour intense operations with rapid vehicle turn around and as limited bottom time as possible to keep at-sea costs down and to maximize the time at sea. Some of the vehicle requirements include the ability to deploy cables that are up to ~5 km in length, lift capabilities up to 4,000 lbs, and latching mechanisms that allow direct coupling of the vehicle to junction boxes (which lowers the risk during the period of transit through the air-sea interface, and also allows precise positioning of infrastructure on the seafloor). Tool baskets/platforms that latch under the vehicle and act as elevators to take equipment to and from the seafloor are also utilized each summer. In addition, a variety of environmental sampling capabilities are required (e.g., vent temperatures, fluid-gas sampling, sediment sampling, and measuring of ocean properties). Because the ROVs are tethered to the ship by a fiber-optic cable, all data are streamed to the ship live. During the UW Cabled Array VISIONS cruises, video is streamed live from the ROV to the ship and then onto the Internet, allowing a global audience to observe all operations in real-time.
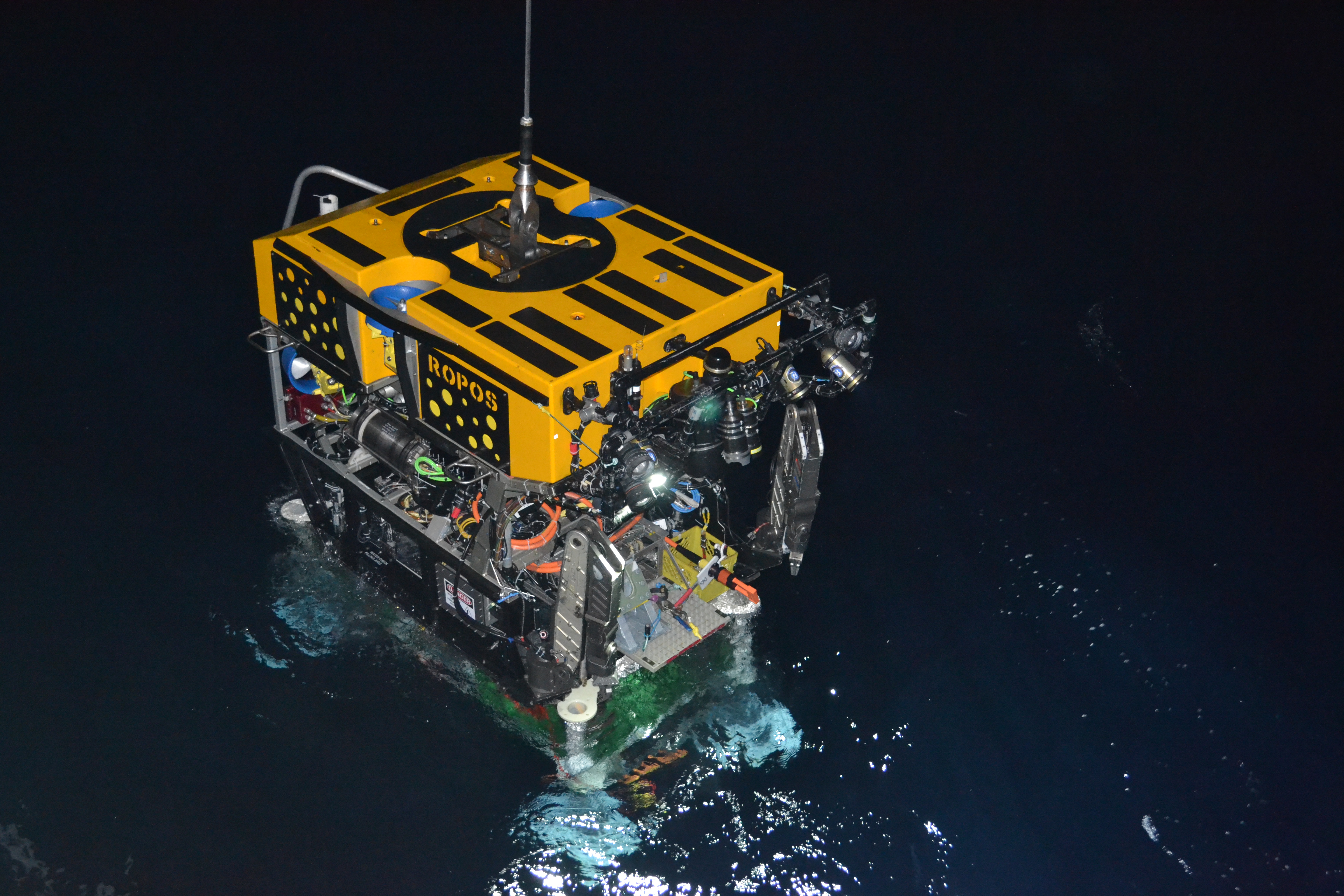
During the Cabled Array 2011-2015 operations, the program utilized the ROV ROPOS operated by the Canadian Scientific Submersible Facility to deploy and test 33,000 m of fiber optic cable, 18 secondary junction boxes, and ~ 140 instruments. All of the cables, junction boxes and cabled instruments were powered up using the custom designed Cabled Interface Box (RIB), which allowed power and communication connections to ROPOS via a short extension cable to the cable or J-box of interest using a removable wet mate connector. ROPOS is again being used for the 2022 VISIONS cruise.
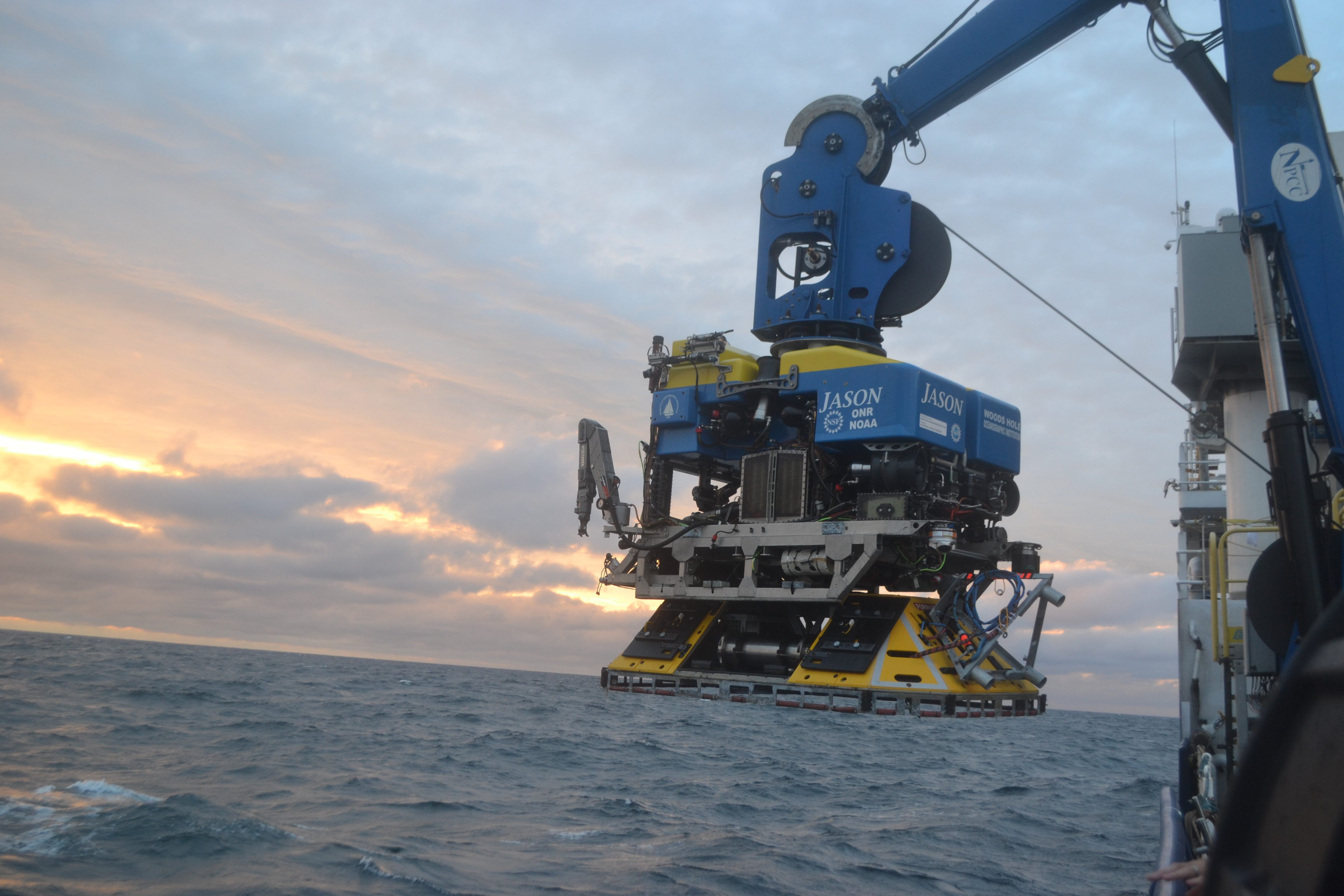
Cruises between 2016 and 2021 used the ROV Jason operated as part of the National Deep Submergence Facility at Woods Hole Oceanographic Institution. Jason is a robotic vehicle that is used to recover and reinstall (turn) much of the Secondary Infrastructure (e.g., instruments, junction boxes) on the Regional Cabled Array. During these expeditions Jason works at water depths of 80 m to 2900 m. The vehicle is tethered to the vessel by a fiber-optic cable that allows real-time communication to and from the ship and the ROV, as well as providing power to the ROV.
In 2016, Jason was modified to meet the special requirements for Cabled Array work – these include heavy lift capabilities (up to ~4,000 lbs) and the ability to latch into the junction boxes and Shallow Profiler Mooring components for recovery and reinstallation. As part of this modification, Jason is now a 1-part vehicle system without the need for the Medea tether management system. Instead, floats are used to dampen wave action.
Command and control of the vehicle is done in a stand-alone control van on the deck where pilots, navigators, engineers, scientists and students all observe myriad sensor and imagery live feeds from the vehicle streamed up the tether at the speed of light. It is a highly interactive environment: during all dives, live video is streamed to shore allowing a global audience to watch over our shoulders as we conduct the Cabled Array work.