






While ROPOS was conducting seafloor operations this evening, we dined on barbecue and birthday cake (for a member of the crew) on the back deck of the Thompson. And the reason we had room to enjoy our dinner in the excellent weather at Axial Base is because of yesterday's deployment of the HPIES (Horizontal Electrometer Pressure Inverted Echosounder) instrument and the Deep Profiler mooring. Those pieces of equipment required a large amount of deck space, and took most of the day to deploy. Successful deployments = open deck space.
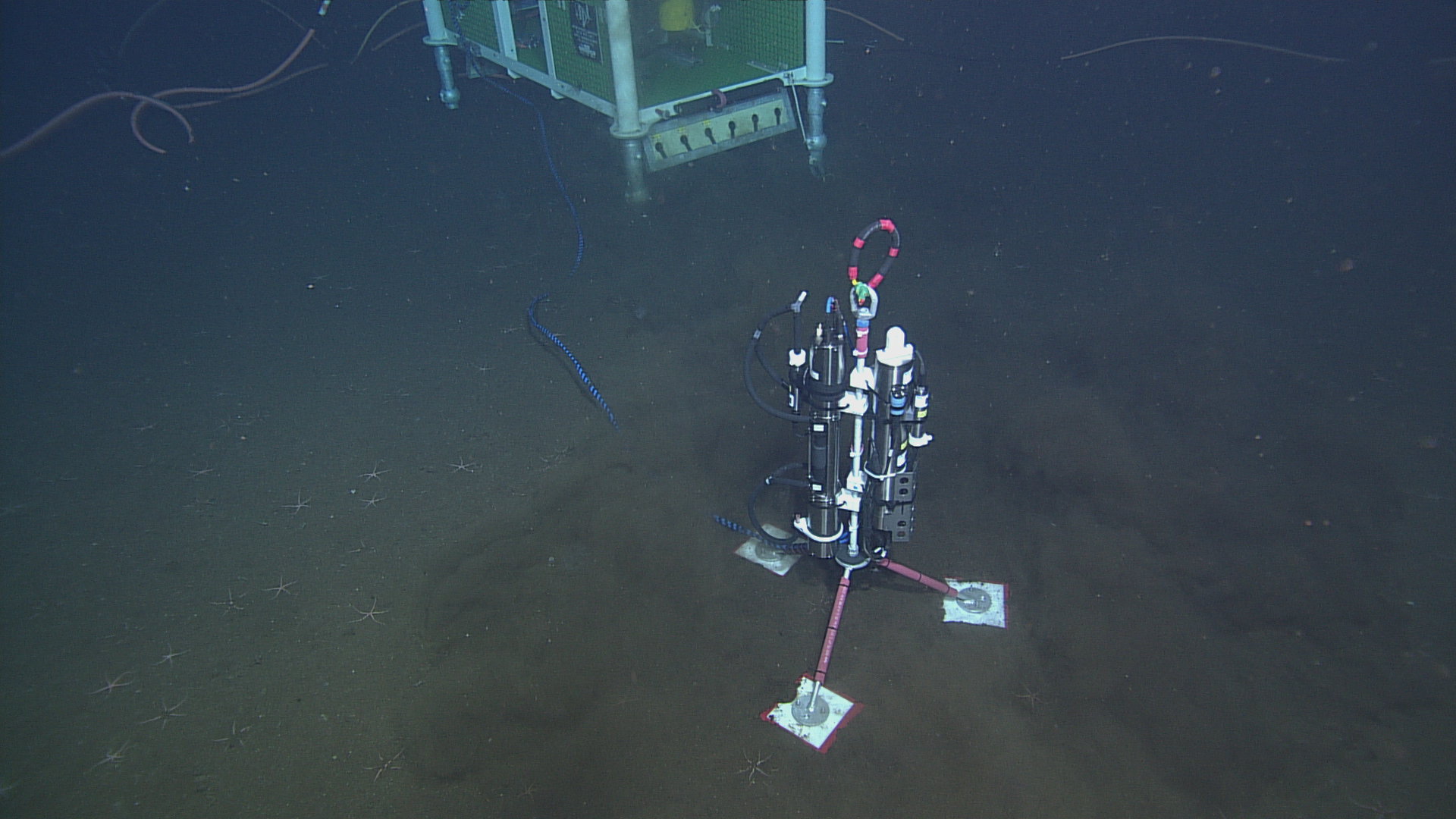
The HPIES was lifted over the transom of the ship, lowered into the water, and released to free fall down to the seafloor, 2600 meters below. It was attached to a kind of reverse parachute, with lines below the platform connected to concrete weights that ensured that the system would fall straight down and land right side up. Successful landing was confirmed during today's ROPOS dive, when they removed the weights, moved the instrument over to the nearby cable connection, and plugged it into the appropriate node. All of which sounds simple, but was a complex operation when controlling a robotic submersible 2600 meters (8500 feet!) below the ship. The ROPOS crew also delicately deployed a small sensor tripod with a CTD and optical sensor that was attached to the nearby junction box.
ROPOS then traveled to the Deep Profiler site, following the seafloor cable and the signal of a beacon attached to the anchor. The goal of this portion of the dive was to recover the beacon, and most importantly to plug the mooring into the cabled network so that eventually it will receive power and send data back to shore in near-real time. This involves ROPOS flying up next to the mooring; a delicate maneuver when trying to keep the mooring line and ROV tether, both extending up into the water column, from becoming tangled together. Then ROPOS has to plug the seafloor cable into the junction box on the mooring, which is also complicated by the fact that there is nothing to push against to get the necessary force to mate the two connectors. This is the current challenge. Once the mooring is plugged in, we can move on to the other dive objectives: collecting water samples, deploying a seismometer, and testing some of the instruments using ROPOS's power system.
In the meantime: cake!