
August 7-8: Pacific Animals
Finally, a clear day! With the fog gone and the sun out, it feels weird looking into the horizon and not seeing any land. The water was clear and calm, barely any sizeable waves.
After dinner, everyone was crowded outside on the back of the ship looking at something in the water. When I got there was a Mola Mola fish also called an Ocean Sunfish floating in the water. This fish was huge and nothing like I’ve seen before. I was able to learn some fun facts about the fish like how there is still debate between scientists on why it floats to the surface, as well as how the fish doesn’t have a swim bladder.

The dive on my shift today was replacing the shallow profiler on a 200-meter platform at the endurance site. This dive was especially interesting to me because the Platform Interface Assembly that was being replaced on the dive is the focus of my research project for VISIONS’21. The current at 200 meters was very fast to the point that Jason could barely move when driving into the current. Therefore, there was a lot of trouble latching onto the shallow profiler to bring it up to the surface, but eventually the pilots were able to do it through a lot of patience.

From this dive I was able to gain a lot of context on how the instrument installed, how it’s supposed to operate in the water column, and how it interacts with the marine environment. Seeing that the mooring wasn’t moving in a strong current during the dive, there would have to be a fairly strong force to push the whole system. I’m thinking a specific angle of current direction hitting the mooring may play a part in the blowdown events.
I’m excited to analyze the ships ADCP data to make a few plots of current velocity around the mooring area. A couple of days ago I was able to speak to a few APL engineers about the design of the shallow profiler as well as their take on the blowdown events that have happened at the PC01A (Slope Base) and PC01B (Endurance) sites.
I stayed in the Jason control van for my backup shift. On this dive Jason went down to the ocean floor at the endurance site to maintain the benthic experiment package. When we got to site, we saw a giant pacific octopus! It was sitting on top of the package curled up. We also saw a Pacific Sol that was on top of one of the instruments. It’s a flat fish that travels along the ocean floor and has both of its eyes on one side, so it’s kind of funny looking.
August 6-7: Busy Days on the Thompson
I’m finally getting used to my shift hours and settling into a consistent schedule. I woke up at 4 PM and got ready for the day (night) before heading to dinner at 5 PM. After dinner I usually work on my project, observe what’s happening on deck, or do various science activities. I then go to my shift in the Jason control van at 8 PM and stay until my shift ends at midnight. From there I am on backup shift where I stay in the control van, but can focus on my project or blogs more. The night schedule is slowly growing on me, too bad that as soon as I am used to the unusual schedule my leg ends and I head back to Seattle.
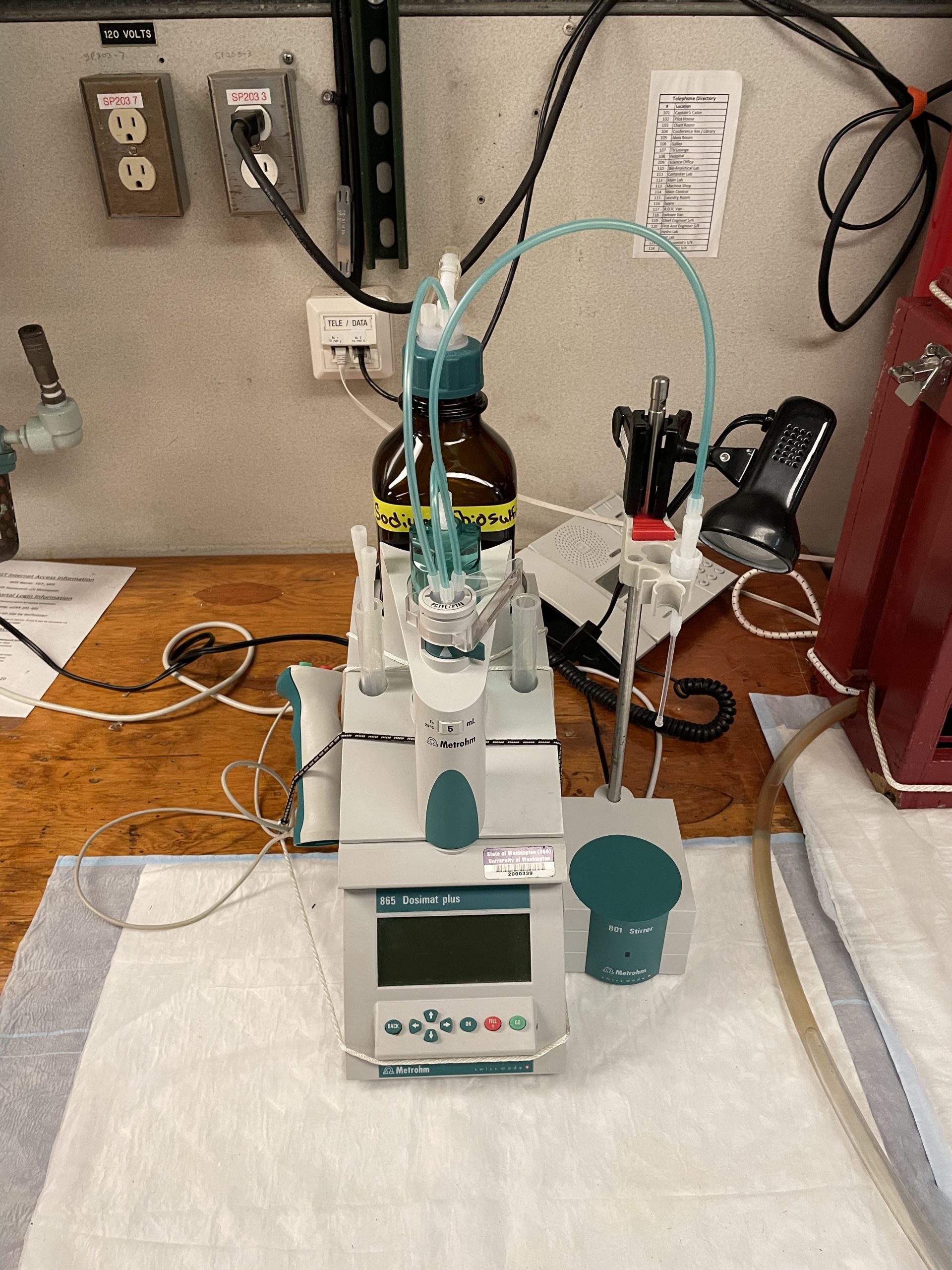
Today I filled my free time between dinner and shift with helping Julie with oxygen titrations. We used a machine I’ve never used before called the Dosimat. It’s essentially an automatic titrator that makes accurate dosing super easy.
When we collected water samples from the Niskin bottle, we preformed the first steps of the Winkler method by adding 2 mL of manganese sulfate and 2 mL of alkali-iodide-azide reagent to the water samples. After attaching a stopper to the bottle and mixing it, a brownish-yellow precipitate formed which means that oxygen is present in the water sample.
Today, we are finishing the oxygen measurement by finishing the process of the Winkler method. We added to 2 mL of concentrated sulfuric acid which dissolved the precipitate. We then hooked the sample flask up to the Dosimat and added sodium thiosulfate until the sample turned a pale yellow. 2mL of starch was added to the sample bottle, turning the sample to a dark blue color. Finally, we slowly kept adding more sodium thiosulfate until the sample turned to a completely clear color. One mL of sodium thiosulfate added is one mL/L of dissolved oxygen.

My shift in the Jason control van was exciting due to us going to the seafloor! We saw a skate when we got to the bottom, as well as lots of brittle stars and anemones. Jason also took push core sediment samples; it was cool to see one of the methods of how sediment cores are taken from the ocean floor.
Later in the night, I was able to get the shipboard ADCP data that I have wanted for my project. ADCP stands for Acoustic Doppler Current Profiler and provides the data fields: u and v (velocity in the north-south and east-west directions), latitude and longitude, depth, ship movement, and time. I am hopefully going to be able to create some maps/plots of velocity at the depth of the shallow profile moorings while on the ship. If not, I am able to finish back in Seattle. While I was getting ADCP data, the ship launched an HPIES echosounder off the side of the ship where it free fell to the ocean bottom. Jason then went and found the echosounder from a beacon that was attached.

August 4 and 5
It’s almost midnight on August 5th, the weather is foggy, and the waves are slowly rolling the ship. The large motion to one side to the other is making me the most uncomfortable out of the whole leg so far, but it was manageable.
Yesterday we were able to take a tour of the bridge of the ship. It was really intriguing to see how a ship this large is controlled. The sonar and satellite systems onboard are impressive and I’m amazed at the accuracy of the GPS as well as the detail of the AIS system. I could feel the motion of the waves in a greater capacity in the bridge due to how high up we were.

Being able to ask the third mate and AB questions about how the bridge operates and their journey to their position now was enlightening and has opened an option after graduation for a career.
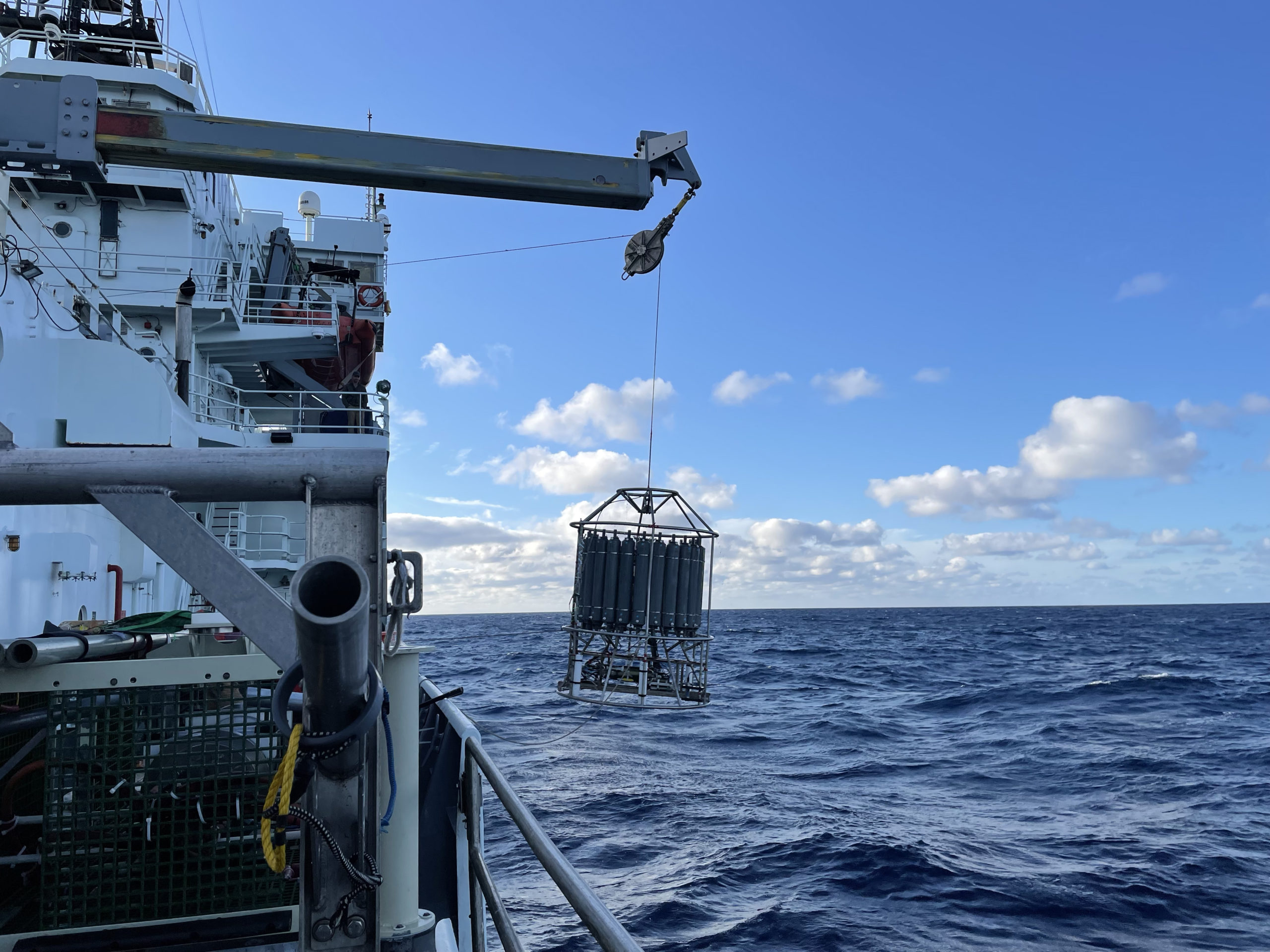
This evening we did a shallow and deep profile CTD cast over Oregon Slope Base (2900 m). We were able to send a mesh bag full of our Styrofoam cups down with the deep CTD. The cups shrunk so much! One of my cups was ripped at the top and ended up curling into itself from the compression. I also had a Styrofoam cat head that I colored and sent down. I’m excited to bring the cat head home to show my actual cat!
My shift in the Jason van just ended, we were mostly in between dives, or ascending/descending the water column. However, there were still a lot of interesting organisms to see such as salps, sea pigs, and different types of jellyfish! I also managed to get a cool picture of Jason surfacing!
The workflow of the ship’s crew, scientists, and Jason pilots is always fun to watch as they are efficient even though there is a lot going occurring on deck.

August 2- August 4:
It’s about halfway through leg 1 of the VISIONS cruise and so much has happened! The evening of August 2nd I saw By-the-Wind Sailors off the starboard side of the ship. There were only a few which is unusual since they usually arrive in large numbers, but they were really interesting to look at especially since they’re related to the Portuguese Man o’ War.
Just before my shift, I helped with casting the Niskin Bottle/CTD rosette for a shallow profile down to 200 meters. I learned how to prepare a niskin bottle by cocking the lids open and securing them. After recovering the Niskin bottles, we collected the water samples and did titrations to get DIC and oxygen data.
After helping out with the CTD cast I had my first shift at 8 PM in the Jason “van” (two large shipping crates put together with large 4k and high-definition screens inside and controls for piloting Jason). My job is logging the progress and events of the dive. While the other student on my shift is in charge of taking pictures and capturing relevant 4k video.
I enjoy logging a lot since I have to understand what is going on during the dive and have all the context for the events that play out. On this first dive, we had to find the shallow profiler mooring at depth and check for fouling, while also replacing cables connected to the profiler. It overall went smoothly except for the loss of the cable storage bucket and a carabiner which had to be crushed to release a cable.

We saw a ton of Salps at 200 m water depth – they were very interesting to look at becuase some were joined together into a very long chain, while others were just by themselves. We also saw a couple of squid!
During my backup shift (Midnight to 4 AM) Jordan and I helped Andrew create a vacuum in around 100 bottles to prepare for the next few legs. We poked a syringe through the cap and hooked the bottle up to an air pump and sucked the air out of the bottle for 3 minutes before taking out the syringe.
The next evening, after having dinner, I reported to my next watch in the Jason van. This time we were on the ocean floor at Axial Base (2600 m water depth) replacing an junction box (LV03A) with a new one and also replacing a CTD/OPTAA tripod with a new unit. It was really interesting seeing the process of changing cables over to the new platform and how Jason uses tools and bungees to efficiently perform work.

I’m now at the end of my shift and ready to go to bed after a long night/early morning. I’ll be back tomorrow with another blog detailing another Jason dive.
August 2nd, 2021

The 40-hour transit to Axial Base is almost over. We are supposed to arrive in the next half an hour or so. The transit from Seattle has been long and tiring, but also very exciting! When we initially left the UW dock, we went through Portage Bay and Lake Washington to get to the Ballard Locks. There were tons of people out since it was a nice day on a Saturday. Kayaks, paddle boarders, yachts, and other small craft were all looking up at us, waving and yelling. It was a cool experience to be the one on the boat this time and not the one watching it pass by. It was a unique perspective seeing the Ballard and Fremont bridge go up for us, as I am usually the one sitting in the traffic waiting for the bridge to go back down. This was also my first time going through the Ballard Locks by boat. There were massive salmon jumping out of the water and seals feasting on the abundance of fish. We stopped that night at the fueling dock and got a nice view of the city at night.

Leaving the next morning we cruised by Whidbey Island and Victoria to get out through Admiralty Inlet. During the day we had a safety meeting where we put on the immersion suits given to us in our berthing. The suits were bright orange and meant to insulate you in the water if you unfortunately have to go into the ocean. The suits were very hard to put on fast and even harder to take off. We had a Jason tour as well Sunday morning. We got to see how the vehicle works and were shown all of its functionalities. We also saw the inside of the Jason “van” on the back of the boat, which is where we will be primarily spending our time during our watch. Inside the Jason van there are high-definition monitors all along one wall as well as pilot joy cons at a couple of the chairs to control Jason and its cameras. I’m excited to see the ROV at work and be a part in making a dive successful!
Later Sunday while I was talking to one of the APL engineers, I saw a spout of water coming out of the water. We went to take a closer look and there was a pod of Humpback whales passing by on the starboard side of the boat! I let everyone in the main science lab know and we watched them for 15 minutes, some of them showed their tails! We also got assigned our watch schedules for the time we’re on the boat. I got the 8 PM to 4 AM shift, which is going to take a lot to get used to, but it should be a good experience! I’ll be eating breakfast for dinner and dinner for breakfast.

The last thing we did Sunday was decorating foam to bring down to depth. The foam will shrink down as the air is squeezed out from all the pressure. I got a couple cups and a cat head to decorate and also a foam ball that all the students are decorating together for this leg. Until the next blog!