A Pacific Flatnose fish seen on arrival at the Axial Base site (2600m) during Dive R1739. Cable AXVMW3 is seen on the left.
Photo Credit: NSF-OOI/UW/CSSF, Dive 1739, V14
A crinoid on a stalk at the Axial Base site, 2600m depth.
Photo Credit: NSF-OOI/UW/CSSF, Dive 1739, V14
A dumbo octopus (Grimpoteuthis) at the Axial Base site at 2600 m water depth. Identified by cephalopod experts Stephanie Bush (MBARI) and Mike Vecchione (Smithsonian) Credit: UW/NSF-OOI/CSSF, Dive R1739, V14.
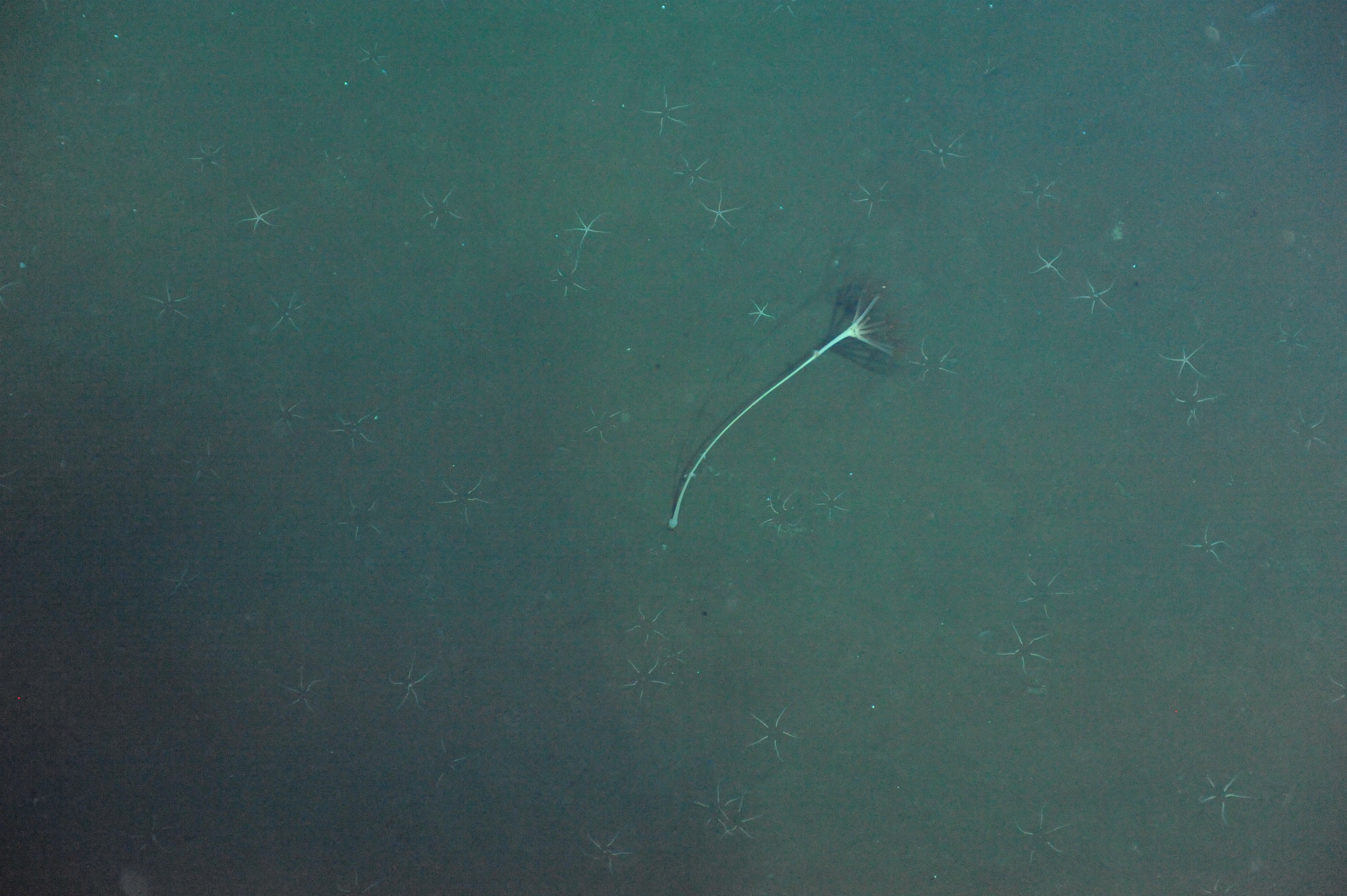
A sea pen, a colonial marine cnidarian belonging to the order Pennatulacea, seen at the Axial Base site (2600m depth) during a cable survey. Photo Credit: NSF-OOI/UW/CSSF, Dive 1739, V14
A spider crab encountered at the Axial Base site (2600m deep) during a cable survey. Photo Credit: NSF-OOI/UW/CSSF, Dive 1739, V14
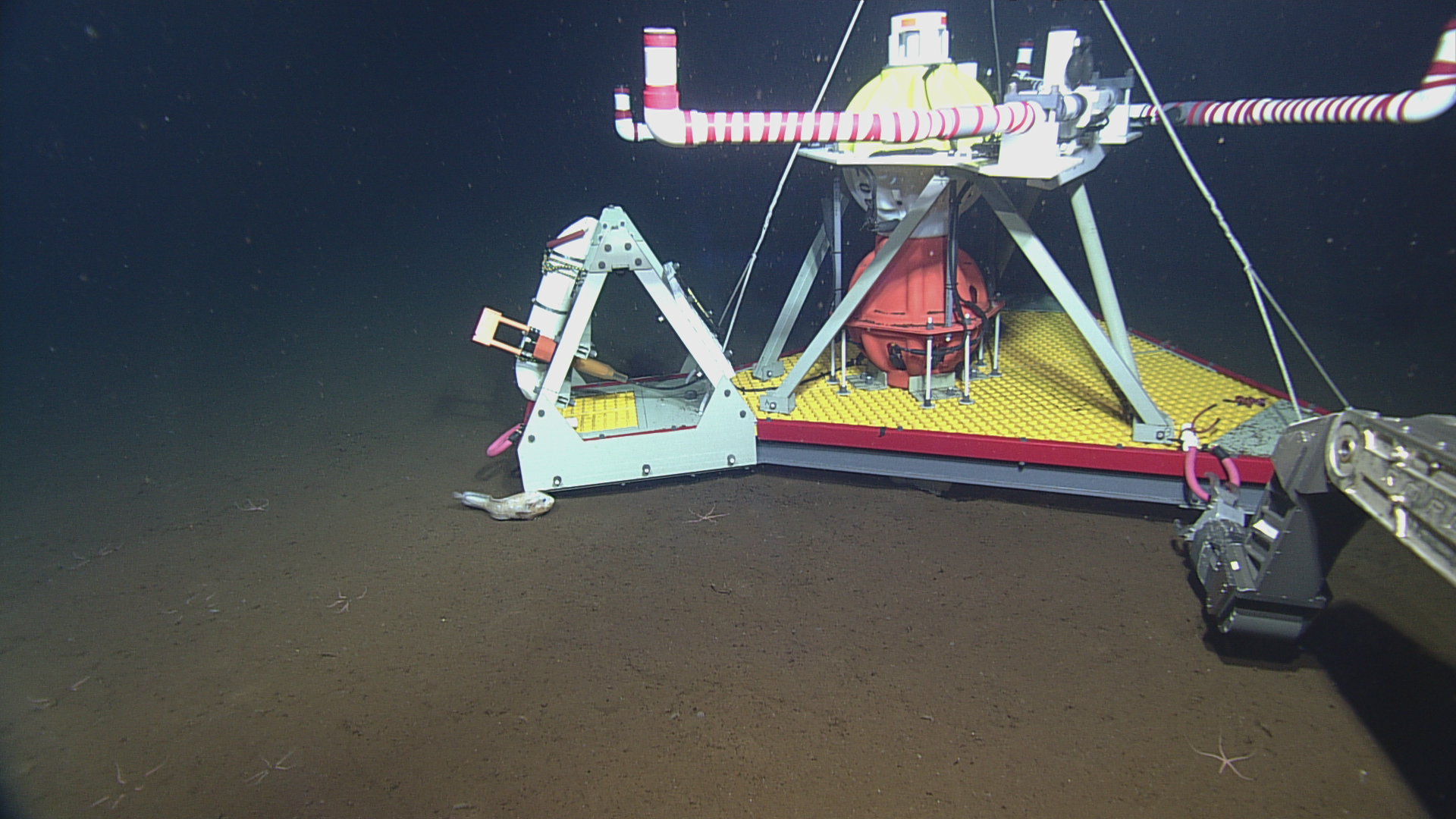
The HPIES (Horizontal Electrometer Pressure Inverted Echosounder) instrument on the seafloor at Axial Base site (2600m depth). Photo Credit: NSF-OOI/UW/CSSF, Dive 1739, V14
Removing the pins holding the descent weights onto the HPIES platform at Axial Base. Photo Credit: NSF-OOI/UW/CSSF, Dive 1739, V14
Two rattails, a Peniagone sea cucumber, and many ophiuroids at the Axial Base site (2600 meters). Photo Credit: NSF-OOI/UW/CSSF, Dive 1739, V14
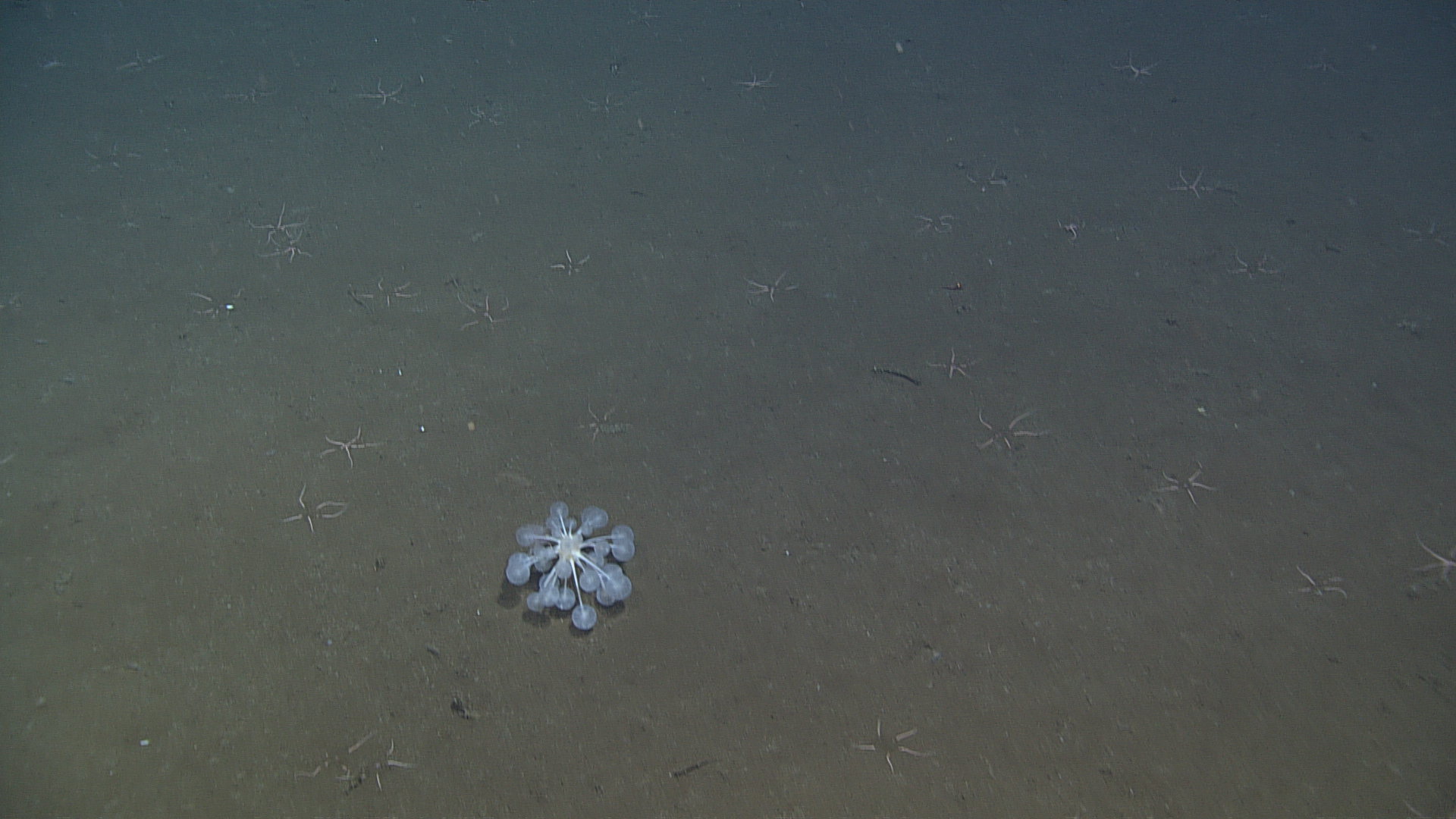
A bizarre sponge, Chondrocladia lampadiglobus, seen at Axial Base (2600m deep). First seen in 1960 in grainy black and white pictures, it was originally thought to be a Russian listening device by the US Navy, before it was eventually identified as an organism.
Photo Credit: NSF-OOI/UW/CSSF, Dive 1739, V14
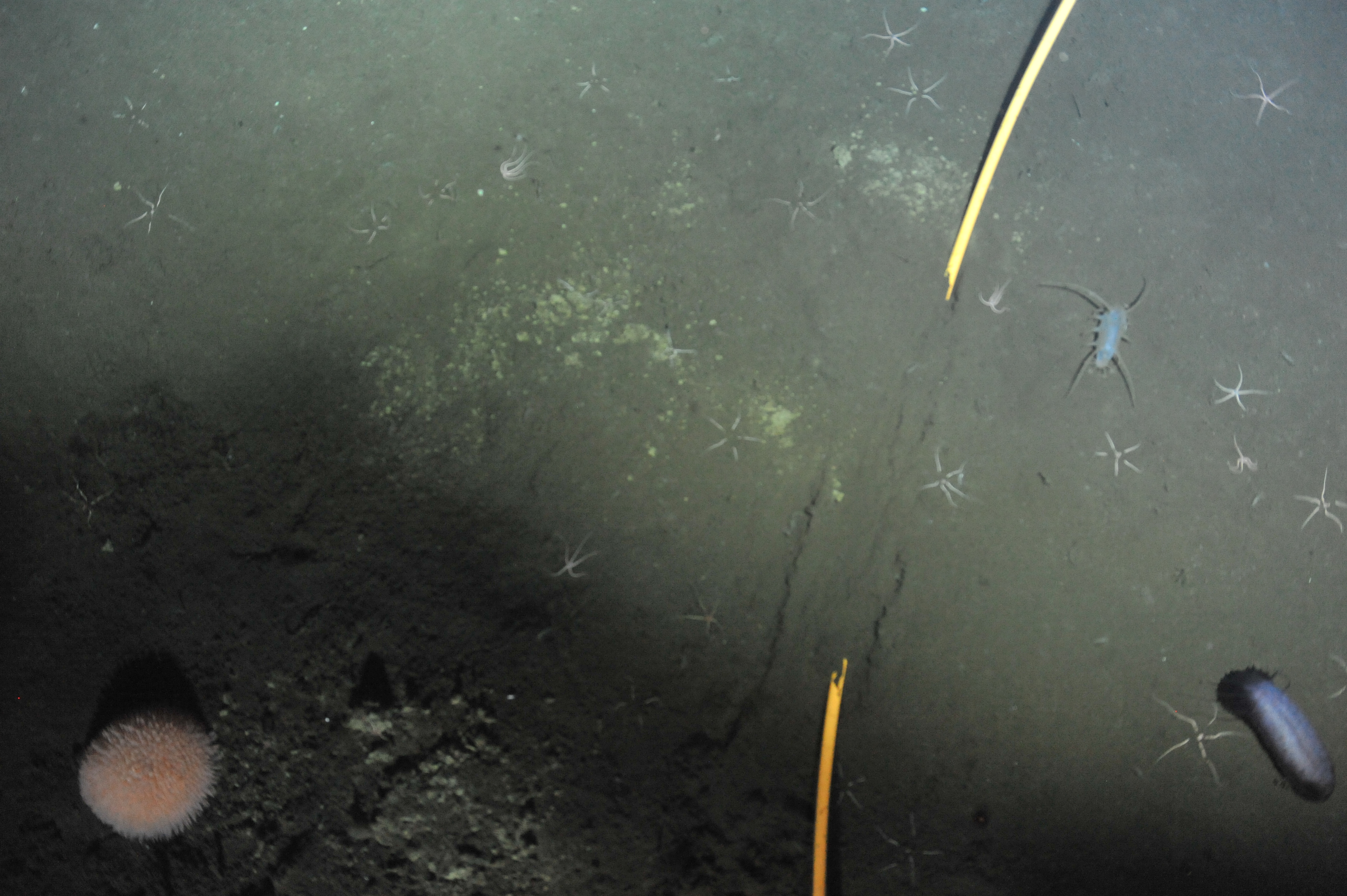
Cable AXVMW3 and assorted invertebrates (pom pom anemone, Scotoplanes, Benthodytes, ophiuroids) during dive R1739 at Axial Base (2600 meters).
Photo Credit: NSF-OOI/UW/CSSF, Dive R1739, V14
A beautiful shot of a Rattail fish at 2564 meters depth at Axial Seamount. Credit: UW/NSF-OOI/CSSF, ROPOS Dive R1739, V14.
A purple ctenophore seen near the bottom (2608 meters) at Axial Base site
Photo Credit: NSF-OOI/UW/CSSF, Dive 1739, V14
ROPOS using a suction tube to vacuum out the caisson for the broadband seismometer at Axial Base. Credit: UW/NSF-OOI/CSSF, ROPOS Dive 1739, V14
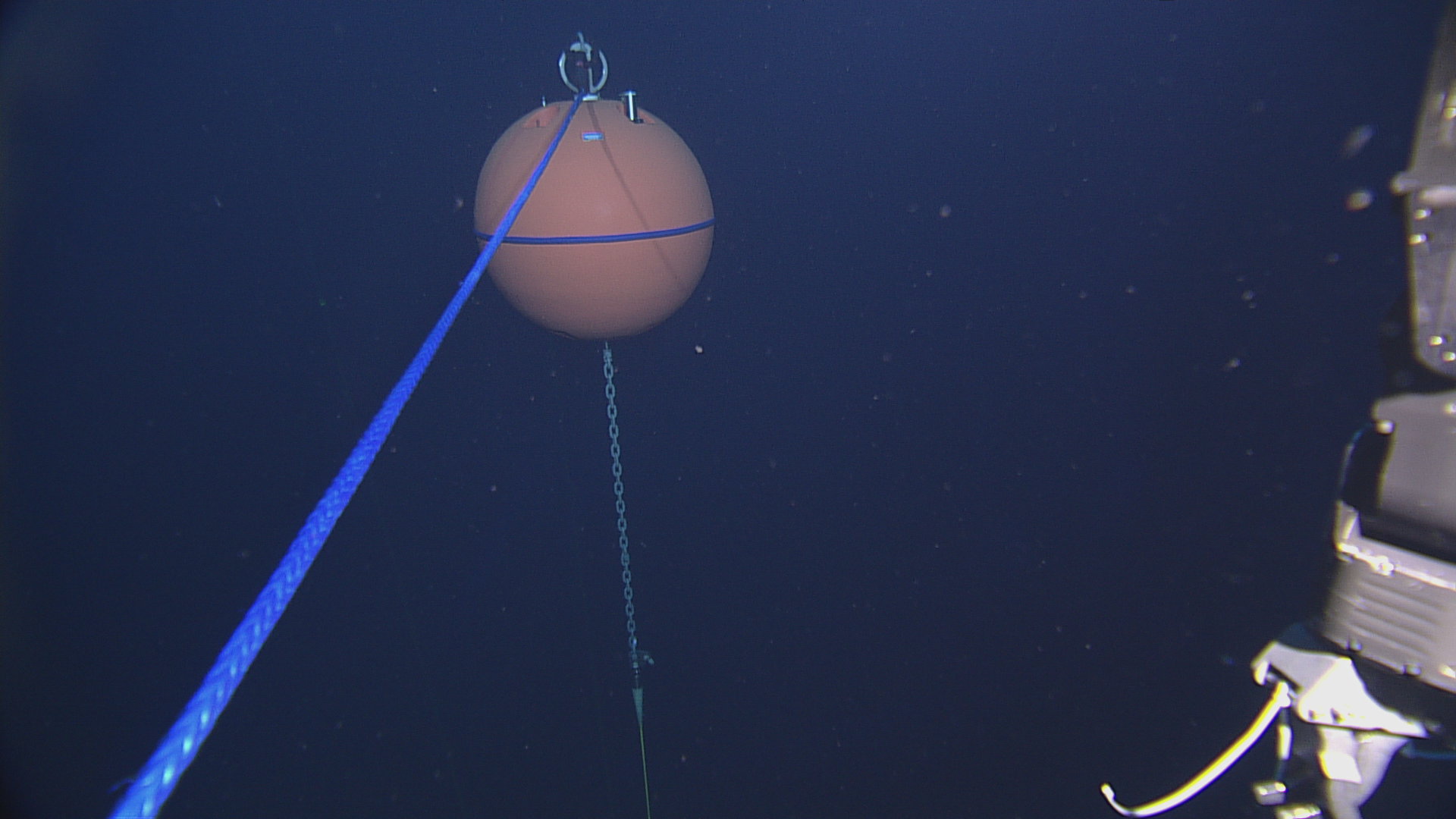
ROPOS attaching a line to the flotation sphere at the top of the deep profiler mooring at Axial Base, prior to recovery to fix a connector problem.
Photo Credit: NSF-OOI/UW/CSSF, Dive 1740, V14
A line attached from the top float of the Axial Base deep profiler mooring to the winch on ROPOS, prior to a recovery to diagnose and repair the mooring connector.
Photo Credit: NSF-OOI/UW/CSSF, Dive 1740, V14
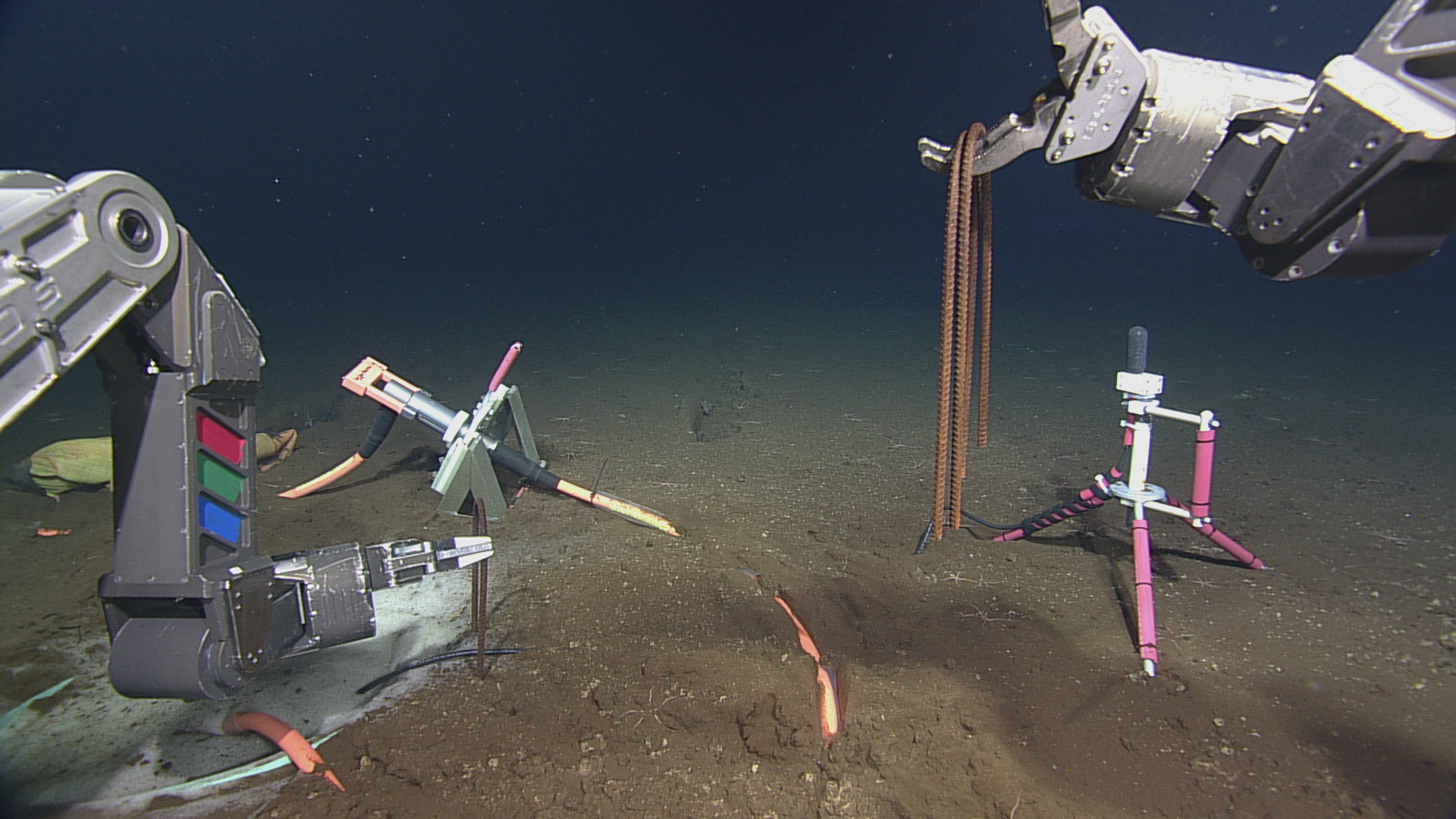
ROPOS uses rebar "staples" to secure the hydrophone cable into the seafloor at the Axial Base site. The hydrophone is mounted on the pink tripod on the right side of the frame.
Photo Credit: NSF-OOI/UW/CSSF, Dive 1739, V14
When working at sea, nothing ever goes perfectly according to plan. Even on the most successful cruises, there are always one or two unexpected events that intervene. Weather is the most common confounding factor; if the weather doesn't cooperate, there's not much you can do except ride it out and wait for a break. But often when the weather gods smile on you and deliver idyllic weather, then you end up with a hydraulic problem on the ROV, or a broken winch, or a malfunctioning sensor, or a kraken attack (one of those might not be real). The true test of an oceangoing team is their ability to roll with the punches and improvise on the fly.
In this case, the complicated deep profiler mooring deployment went off without a hitch, the weather is gorgeous, and the ROPOS ROV is operating perfectly. Unfortunately, when it came time to plug the seafloor cable into the mooring's junction box (through which power and data pass), the sockets wouldn't cooperate. Despite several hours of fruitless attempts, no amount of force, leverage, or changes in angle would make the two connectors mate together. Eventually the effort had to be abandoned, and we moved on to the rest of the dive objectives. While ROPOS installed a seismometer, hydrophone, current meter, CTD tripod, and pressure sensor (and took water samples to be analyzed onboard), the science and engineering teams put their heads together to come up with a contingency plan.
The ultimate decision was to have ROPOS return to the Thompson and begin operations to recover the profiler mooring so that the connector problem could be diagnosed and repaired, and the mooring returned to the seafloor. This was a hard call to make, because the profiler is moving up and down on the wire, the mooring is extremely heavy and long, and recovering and redeploying will take up valuable ship days that were supposed to be devoted to more deployments. But a cost/benefit analysis showed that it was more advantageous to try to take advantage of the weather and onboard engineering expertise to try to fix this problem now before moving on to another site. Cruise objectives further down the line will be reshuffled and the schedule will be changed, but we have high hopes that this mooring will be operational soon and we can return to port with the vast majority of this leg's objectives fulfilled.
The other test of a successful team is the ability to remain positive in the face of adversity. In this case we have a highly skilled and optimistic group onboard the Thompson, who will keep working their hardest to meet the cruise objectives, finish construction of the OOI cabled array, and begin delivering new and exciting ocean data to the world.